_________________________________________________________________________
Title: How an autonomous vehicle works
Name: Ashfarin Nasiha
Course: ENGL 210
Instructor: Brandon Borcoman
Date: 06/07/26
Introduction:
An autonomous vehicle is a driving system designed to reduce or fully eliminate the need for continuous human control. All the way back in the 1950s, vehicles offered only basic driver assistance features such as cruise control, then we started to get help from our cars in key moments like automatic breaking then we got more continuous support like lane keeping assistance and started to have more clear goal, then categories of self-driving were born. Cars are now already in level 0 and 1 where cars are giving support, but humans are in charge. With levels 2 and 3 it starts to get into cars doing more of the work and people doing more of the monitoring. The latitude levels are 4(certain geographies) and 5 where humans are not even monitoring at all. Finally, the fully autonomous Vehicle is level 5 in charge, no humans monitoring at all anywhere anytime. Most people purchase cars around level 2. And most car companies are working on level 3, 4 and 5. Some cars are running real tests with real people that means we are already in level 4 as in driverless car rides with humans inside. It is either as a driver-assistance system or as a fully self-driving system depending on its level of automation.
What is the Process:
The vehicle perceives its environment using multiple sensor technologies, including 360° cameras, long-range radar, ultrasonic sensors, and LiDAR. Cameras detect visual features such as lane markings, traffic signs, pedestrians, cyclists, and other vehicles. LiDAR emits laser pulses to generate a high-resolution 3D map of surrounding objects by measuring distance and shape. Radar tracks the speed, direction, and distance of moving objects, especially in poor weather conditions. Ultrasonic sensors assist with short-range detection, such as parking and close obstacle awareness.
Function of the Process:
The main goal of the process is to drive safely without human control that can be wholly or partially. The safe driving of the impaired and comfortable driving of the normal human is established through this autonomous vehicle.
How the process worked and what performs it and principal steps:
Evaluating the environment:
The devices or technology which are used in this part are:
- Cameras:
It detects lane markings, traffic signs, traffic lights, vehicles, pedestrians, cyclists
and classifies objects based on visual 360 degree features.
- LiDAR:
Stands for light detection and ranging. It works by sending out pul by light waves and bounces back from the object. It uses the time it took each pulse to return to calculate the travel, how far away it is with its size and shape. A typical lidar pulse contains thousands of beams of infrared laser light which can create point clouds which can render a 3d view of the environment. It even works at night and in foggy weather.
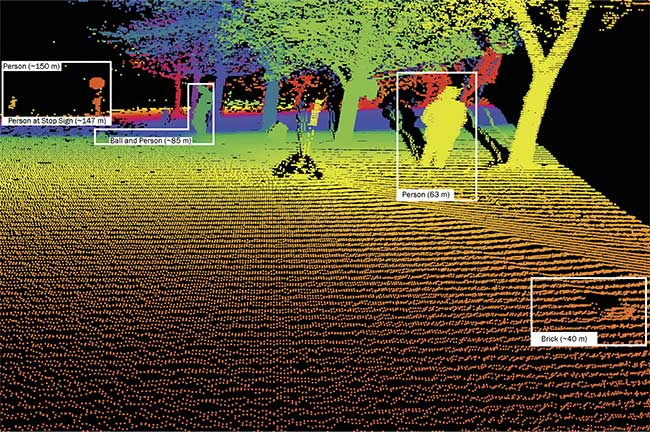
Fig 1: what LiDAR sees
- Radar:
It transmits radio waves and analyzes the signal that is returned
The collected data then determines objects in motion around it and their distance,
speed and direction in extreme weather. This is a support system along with
LiDAR.
- Ultrasonic sensors:
It measures the short-distance using sound wave reflection accurately.
- GPS:
It uses gps to track the car’s global position and needs when reaching a certain point from a certain point of the map.
- Inertial Measurement Unit (IMU):
Microsensors of this device track movement and orientation in 3D space by converting physical forces from the object into electrical signals.
Combining received data: Here the data collected from camera, LiDAR, radar, gps, and IMUis passed to the system to process the information using a processor from each of these devices. One sensor cannot complete this job. Machine learning here detects every pixel and coding to fill the information necessary in real time, constantly fusing the data into the system. This process is important because without combining the information from each device the ai system won’t be able to make a picture to map the environment according to its need and plan ahead.
Mapping the environment:
The whole map of the environment is generated by combining the data from all the devices. LiDAR and radar are both used as pre-object assessment and render their positions shape and size in heavy weather. Ai uses the data from the speed of their object analysis of the motion, so predictions of future movement are also calculated by the processor here. Machine learning uses surveillance cameras to determine the signal or the identification of the object that cannot be identified by the LiDAR or radar. Now the pieces of information are joined together to give a full picture of the environment surrounding the car and it also verifies the obstacles in motion or static and uses them to make decisions of driving.
Executing the work:
After the layout is clear and predictions are complete the system makes the decision of when, where and how to reach there controlling its own parts. Lane centering, changing lanes, stopping at signals or emergency, increasing or decreasing velocity of the car, finding the fastest and efficient route to destination by controlling its steering, brake and accelerator and a wheel encoder to drive itself combining all the steps real time constantly.
The real world changes every second so machine learning ai has to do this every second of the day by planning ahead changing its gear as necessary.
Where and When the process takes place: The detection and navigation of an autonomous vehicle happens inside the system of the autonomous vehicle which includes the sensors, the data processor using ai, software algorithms and by-wire controlling feature. It happens in real time inside the vehicle as it is operated.
The machine learning computing system located inside the vehicle which depends on a remote cloud service to enact.
The key component of the vehicle is its devices and the principal steps : evaluating the environment, combining the data from the sensors, mapping the environment to plan the execution and executing the work itself. Without these steps it won’t be possible to autonomously drive the car. If one of these steps fail, the system would collapse and there could either be a collision accident or the car may come to halt depending on the emergency arrangement done by the system. That’s why the level of perfection the car companies or autonomous car companies are trying to compete on level 4 of drivingness of autonomous vehicles.
Conclusion:
To get an overall picture of the surroundings, the autonomous vehicle system combines information from cameras, LiDAR, radar, gps, ultrasonic sensors and IMU. Diving decisions are made by a central computing system that processes this data. The controls for acceleration, braking, and steering then affect the decisions. Together these parts let the car run safely and effectively without the need for human intervention.
Citations
National Highway Traffic Safety Administration. (2022). Levels of automation. U.S. Department of Transportation. https://www.nhtsa.gov/sites/nhtsa.gov/files/2022-05/Level-of-Automation-052522-tag.pdf
RGBSI. (n.d.). What is sensor fusion for autonomous driving systems? – Part 1. https://blog.rgbsi.com/sensor-fusion-autonomous-driving-systems-part-1
Youtube.(n.d.). Video[Video].YouTube. https://youtu.be/Hr6GPYCHTfA